Shape orthotropy of plates
Main principles of the transformation into physical orthotropy
Certain bridge, floor, foundation and other structures are similar to plates in terms of the hypothesis (11), i.e. their total “thickness” h is small in comparison with plan-dimensions L. On the other hand, they represent a body of a more general shape, e.g. ribbed plates, hollow core slabs, plates with both weak and stiff reinforcement, e.g. with I-beams embedded in the concrete, corrugated plates, double-layer braced plates, etc. Only occasionally is the total flexural stiffness of such shapes identical in both (i) longitudinal x-direction and (ii) transverse y-direction. Usually, the stiffness in the two directions can differ even by a factor of ten. This is not due to different modulus E1 and E2, but due to a varying section in planes x=constant. It is therefore the shape (not physical) orthotropy of the plate in terms of shape or technical orthotropy. Global behaviour of such plates (without a detailed stress analysis in the vicinity of statically, geometrically or physically singular points and without other irregularities due to the real shape of the body) can be analysed by means of methods and programs developed for physically orthotropic plates, as long as the following assumptions are taken into account:
Displacement components u, v, w (3) must be unequivocally derivable from the plate deflection surface w (or from the three functions (2) in case of plates with the effect of shear taken into account) across the whole analysed body, which means also its deformation ε and stress σ components, or the internal forces acting in the section across any part of the body. This requires establishment of suitable geometrical hypotheses, such as (4), verified in terms of accurateness through various reasoning, experiments, practical experience, etc.
Based on the hypotheses (a), the following must be unequivocally specified for every type of shape orthotropy in plates:
b1) INPUT: Constants Dik in the matrix of physical constants D for physically orthotropic plate that is going to substitute the analysed plate in the calculation.
OUTPUT: Further utilisation of outputs of internal forces in the substitute physically orthotropic plate for the needs of design and checking of the analysed plate with shape orthotropy, i.e. what internal forces or what stresses arise in the analysed plate.
An accurate analysis of meeting the assumptions (a) and accurateness or technical applicability of results would require a comparison with the exact three-dimensional solution of a real structure at least in several characteristic or limit states, or with reliable experiments and tests. This is available only for certain examples, e.g. for steel ribbed plates, etc. Then, more precise data about the composition of the slab section appear in the input (b1). Mostly however, such analysis can not be performed and only an approximate method can be used for the comparison, e.g. for box-section plates, which, however, is not a proof, as the variation from the exact solution is not known. In view of numerous factors that influence the properties of civil engineering structures, some well-tried formulas – extended by up-to-date knowledge about, in particular, torsional stiffness – can be accepted for the approximate calculations.
Simple types of orthotropic plates
Energetic equivalence of sectional characteristics
In paragraph 6.2 we will discuss plates in which the effect of transverse shear can be neglected and in which the classical Kirchhof hypothesis (4) is satisfied within the whole range. Practically speaking, these are common, not-too-thick plates that are ribbed, corrugated or stiffened in two directions x ^ y identical with the selected direction of coordinates (e.g. [1], p.37, Fig.9).
The principle of potential energy equivalence of internal forces in the real and substitute body must be observed in the transformation into a physically orthotropic plate, i.e. in the calculation of constants Dik in the stiffness matrix  (16). For the plates in question, it is the following formula
(16). For the plates in question, it is the following formula

|
(35) |
which is the integral of the products that represent only work of moments (similarly to a slim beam subjected to bending and torsion) on curvatures that can be, for small deflections w, expressed by second derivatives. In the calculation of the substitute plate by means of the finite element method, the second mixed derivative will be continuous everywhere (or at least everywhere with the exception of shapes with zero surface area) and the following condition of equivalence is met
| wxy = wyx . | (36) |
Similarly, the theorem of reciprocity of torsional moments will be valid in the substitute plate:
| Mxy = Myx | (37) |
and thus (29) can be simplified to:
|
|
(38) |
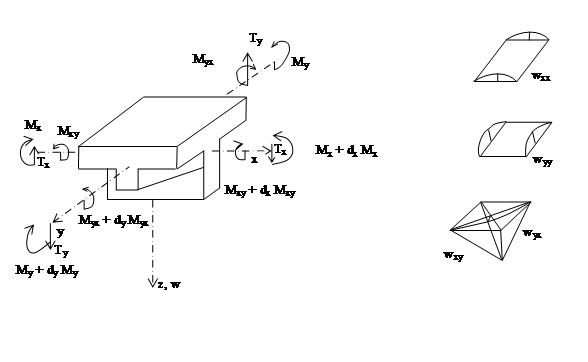
Fig. 2
The positive direction of all quantities is shown in Fig. 2. The comparative level (Πi = 0) is the primary non-deformed shape. Πi is always positive.
Let us have a system of two beam skeletons that are parallel to x- and y- axes and have flexural stiffness (E’J)x, (E’J)y, torsional stiffness (GJk)x, (GJk)y, flexural curvature κx = wxx,, κy = wyy and relative twisting ϑx, ϑy. The potential energy of bending and torsional moments of such a system is

|
(39) |
Comparing (39) with (35), we can get – only formally at the moment – the following formulas for plate strips of unit width dx = 1 or dy = 1:

|
(40) |
As the transverse contraction and elongation of element sections cannot occur freely in a compact plate (Fig. 3),
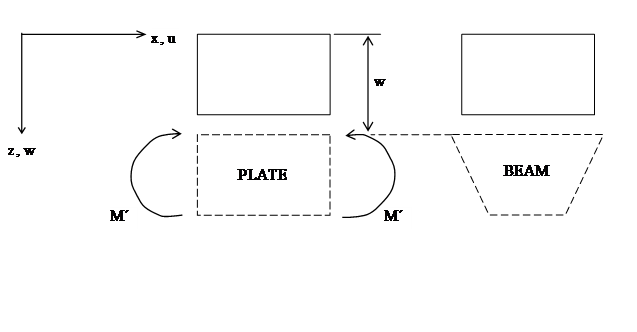
Fig. 3
the plate strips are rather stiffer in bending than the beams. This can be included into the modulus of elasticity, and thus e.g. in the case of an isotropic plate we have the module

|
(41) |
which follows from the exact relation between σ and ε. In addition, it can be seen in Fig. 3 that the transverse contraction of the section is prevented in plates by certain transverse moments M’. E.g., the transverse moments occurring in isotropic plates subjected to bending moment My and deformed to a cylindrical surface w(y) are
| M´ = Mx = μ My | (42) |
and similarly, in plates subjected to bending moment Mx and bent to the surface w(x) we have:
| M´ = My = μ Mx , | (43) |
This effect vanishes in materials without transverse contraction (μ = 0).
Let us examine the consequences of formal equations (40) to (43) in isotropic plates with the thickness h << 1, so that
|
(44) |
Let us employ the well-known relation for shear modulus

|
(45) |
and let us name the known plate-constant as
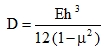
|
(46) |
We get formulas defining the relation between moments and curvature
|
(47) |
that are in full compliance with formulas derived from the hypothesis (4). In addition, using Fig. 4, let us consider that the total twisting ϑ (more precisely the torsional curvature) of the plate element is influenced by both pairs of torsional moments, so that

|
(48) |
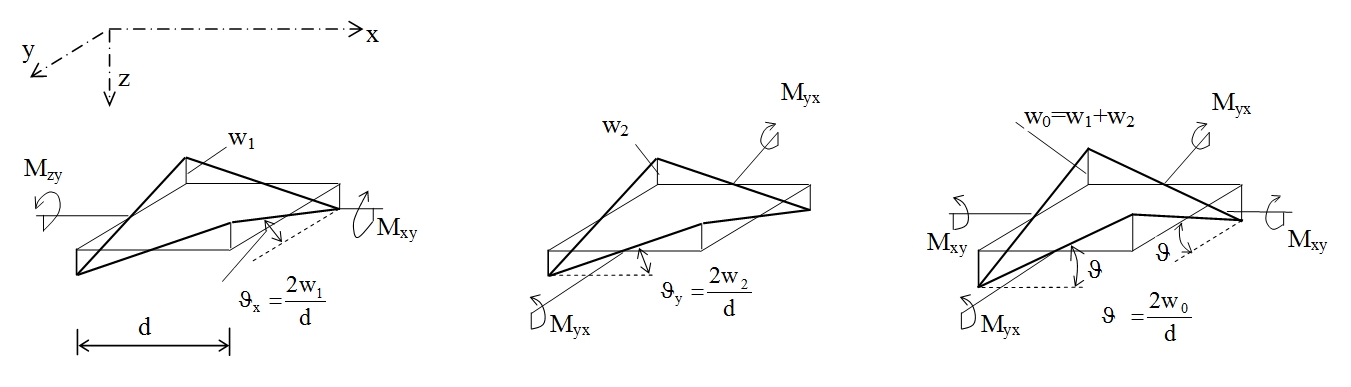
Fig. 4
In plates the continuous mixed derivative wxy = wyx = ϑ (see also Fig. 2, the element is deformed into a warped line surface of a hyperbolic paraboloid type 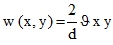 in local coordinates x, y with the origin in the centre of the element, so that in the corners
in local coordinates x, y with the origin in the centre of the element, so that in the corners 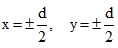 we get w = ± w0. A general formula then follows from (40)
we get w = ± w0. A general formula then follows from (40)
|
(49) |
and in the case of isotropic plates it is
|
(50) |
After substitution from (44) and (45), multiplication by one in the form of  and use of
and use of
(1+μ) (1-μ) = (1-μ2) we obtain

|
(51) |
which is the same formula that can be derived by an accurate procedure (integration of τxy) from hypothesis (4). Therefore, the beam-based theorization about physical constants of a plate leads to the correct stiffness matrix D of an isotropic plate. Using (16) or (33), (47) and (51), we can write it in the form usual in FEM:
|
(52) |
It can be therefore expected that such a theorization will not be principally (i.e. as far as equilibrium and continuity conditions are considered) defective even in simple plates with shape orthotropy, which is also supported by the existing experience obtained in experiments and in real practice.
Bending and torsional moments
The dimension of these quantities is force, or more clearly, force × length per unit width of a plate section. Using the main SI units, it is N (Newton) or Nm/m (Newton meter per 1 meter of width).
Conversion to previously used units:
1 kp = 9,80665 N = 10 N
1 Mp=10 4N = 10 kN
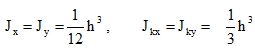
All sectional characteristics Jx, Jy, Jkx, Jky must be calculated either (i) for a unit width of a section or (ii) for another width of the section ‘b’, e.g. for the distance between ribs or the size of the finite element and then the result must be divided by this ‘b’. The dimension of J is therefore m3.
Plates without transverse contraction
This group includes practically all ribbed plates with open ribs (not hollow core slabs), because the flexural stiffness of such plates is derived mainly from ribs that do not influence each other in transverse direction as there is no continuous contraction in this direction. The value termed as “effective value of μ” is very small (e.g. 0.02) also in reinforced concrete plates with thin ribs, especially after the formation of cracks in the tensile concrete, and calculations of such plates for μ = 0 are accurate. The matrix of physical constants is diagonal as D12 = D21 = 0, see (28). What remains is to determine D11, D22, and D33.
The first two bending constants are quite clear and they can be calculated using (40) from
| D11 = (EJ)x, D22 = (EJ)y, [Nm]. | (53) |
The formulas include also possible diverseness Ex ≠ Ey [Nm-2]. Jx, Jz [m3] are related to the unit width of plate sections in planes x = constant and y = constant. For the most common situation of Ex = Ey = E and for the calculation of Jxb, Jyb [m4] for ribs with an effective width of the plate bx, by we have
|
(54) |
If the plate of the height h is ribbed only in its x-direction, then

|
(55) |
For the needs of this calculation, in common concrete plates with ribs in both x- and y- direction, the full distance shown in Fig. 5a can be taken as the effective width bx, by.
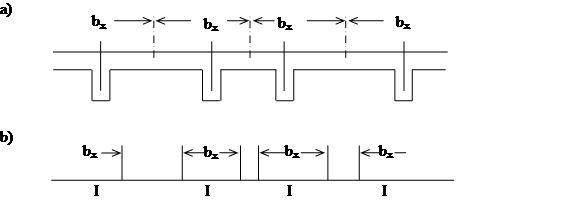
Fig. 5
Only for thin plates, e.g. steel orthotropic deck slabs, the reduction of bx, by according to technical standards is more significant (Fig. 5b). It is however necessary to considered the real loading conditions of the plate and other circumstances and not only apply the formula given in the standard, as it is valid for stress rather than for the substitute flexural stiffness. When bx, by are uncertain, we recommend a consultation with the author of this guide.
The third constant, torsional D33, is more problematic, but in most situation we can get satisfactory result using the formula that follows from (24) for μ = 0.
|
(56) |
For isotropy and μ = 0, this formula transforms into the correct value of 1/2 D, see (52). This is then represented by one torsional moment MFxy = MFyx of the substitute physically orthotropic slab.

|
(57) |
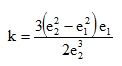
The equality MFxy = MFyx follows from the theorem of reciprocity of shear stresses τxy = τyx (Fig. 6a) that must be valid on the vertical edge of the plate element also in plates with shape orthotropy, but that does not imply the equality of torsional moments, which clearly follows from Fig. 6b. Torsional moments can be obtained by the integration of the shear stress flow over the section through planes x=constant and y=constant:
|
(58) |
|
(59) |
In order to apply formulas (58 and 59) accurately, we would have to know the exact distribution of shear flow over the sections of the given plate with shape orthotropy. It is quite a difficult three-dimensional problem that would require rather challenging application of the finite element method. Therefore, let us perform first an approximate technical calculation based on the estimate of torsional stiffness strips, like beams in a grate, without continuous dependencies. As wxy is a continuous function in plates, we have
wxy = wyx (Fig. 6c) and the comparative beams have the same relative twisting angle, and thus the ratio of moments (58) and (59) is
|
(60) |
Let us define a sum-relation between moment (57) and moments (58), (59) that is not in contrast with the isotropy. If we compare the formulas for energy (35) and (38) where there is a continuous mixed derivation of the function w, in which wxy = wyx, it follows:
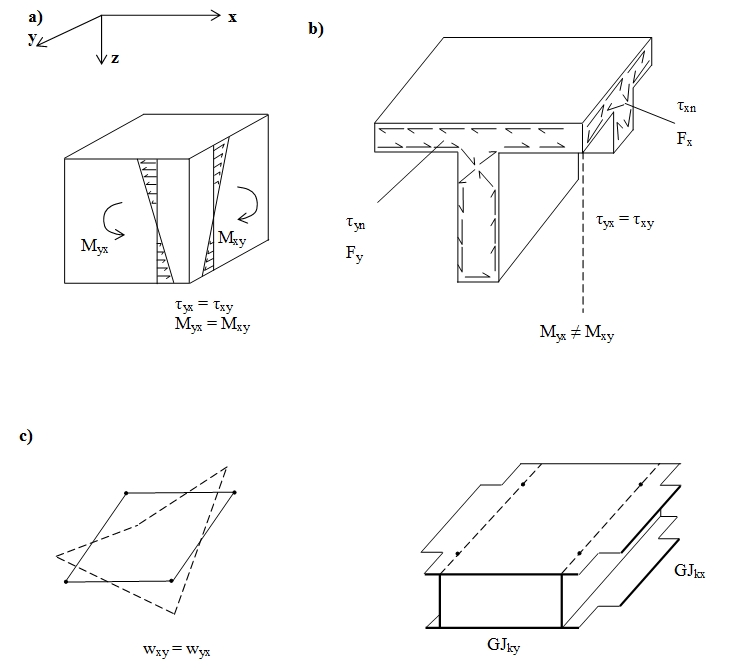
Fig. 6
|
(61) |
This leads us to the following values:

|
(62) |
Substituting (62) into the formula (49) we get
|
Comparing with the formula (57)
|
we obtain the formula that will be used to calculate the input value D33, i.e. the torsional stiffness of the substitute physically orthotropic plate.
|
(63) |
Quantities Jx [m3] are related to a unit width of the section. Usually, they are calculated for another suitable width (beam-like section) b, so that Jk = Jkb [m4]: b [m].
The drawback of this approach is that a pure Saint-Venant torsion is prevented in the plate in the x- and y- direction, as:
the surface shear stress is not zero (τ ≠ 0 on vertical sides of the surfaces ) over the whole surface of these strips,
free warping is prevented in these strips.
The deviation is not too large in rather thin plates with rather thick ribs. Under different configuration this approach can be applied if everywhere │Mxy │‹ │Mx ,My│. If we calculate quantities Jk from the accurate shear flow (58) and (59), the approach will be always acceptable. Exceptions, such as plates with encased I-beam etc, should be consulted.
Approximate calculations of common structures can be performed with D33 determined from the formula (56) that does not require identification of torsional stiffnesses. It can be proved that both the formula (56) and the future formula (72) for plates with transverse contraction are in the case of isotropic plates identical with the formula (63), see the reasoning in paragraph 6.2.1 following the formula (44). It generally follows from (61) that
|
(63a) |
and in our simplification we have
|
Let us remind that the first subscript of τ and M always denotes the area (section x = constant) on which τ or M acts. The moment Mxy thus shortens the plate strips parallel to the x-axis, and the moment Myx the strips parallel to the y-axis. See also Fig. 4 where the positive direction of these moments can be clearly seen.
Two special situations for formulas (62):
a) A plate with the same torsional stiffness in the x-direction and y-direction, i.e. Jkx=Jky and Mxy= Myx= MFxy is the printed value of the torsional moment.
b) A plate with a predominant torsional stiffness in one direction, caused e.g. by thick ribs that are rigid in torsion in one direction – let us mark it x. It is characterised by a strong inequality Jky‹‹ Jkx. In such a plate the formulas (61) and (63) give
|
and thus the torsional moment in the x-direction is the double of the printed moment and it is zero in the y-direction.
The real value is between the limits of type (a) and (b). If we deal with what is called design moments represented in outputs by values
|
(64) |
it must be considered that  (the superscript F still means the physically orthotropic plate for which the whole calculation is done), but
(the superscript F still means the physically orthotropic plate for which the whole calculation is done), but  is only a formal value. The application of values (64) is therefore useful for situations approaching the limit of type (a). Otherwise, it would be reasonable to use a correction in the meaning of the formulas (61) or (63).
is only a formal value. The application of values (64) is therefore useful for situations approaching the limit of type (a). Otherwise, it would be reasonable to use a correction in the meaning of the formulas (61) or (63).
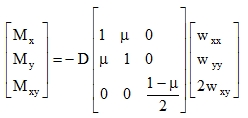
Plates with transverse contraction
Coefficients of transverse contraction in plates with shape orthotropy can be, following from (16) to (18), assigned the following visual meaning (Fig. 7):
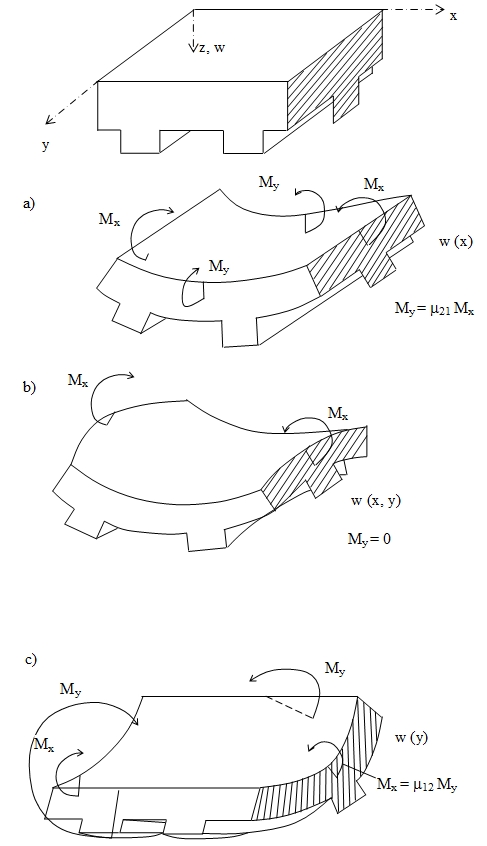
Fig. 7
Let us deform the plate element as in Fig. 7a into the shape corresponding to a cylindrical surface w(x) with a constant curvature wxx. Then wyy = 0 and, according to (16), the following moments are necessary to cause such deformation:
| Mx = -D11wxx , My = -D21wxx = μ21Mx. | (65) |
If we subject the element only to moment Mx, it would lead to a state shown in Fig. 7b, because the following condition follows from the second line of (16) with My = 0:
| D21wxx+D22wyy = 0 , |
and therefore, the element would be distorted also in the y-direction with the curvature wyy = -D21wxx / D22 = -μ12wxx. To produce the same curvature wxx, smaller moment would be sufficient:
| Mx = -D11(1-μ21μ12) wxx. |
Similarly, the following moments are necessary to produce a cylindrical deflection w(y) of the element in the y-direction (Fig. 7c):
| My = -D22wyy , Mx = -D12wyy = μ12My. | (66) |
If the load is formed only by moments My, i.e. if Mx = 0, it leads, according to the first line of (16), to a non-zero curvature wxx = -D12wyy/ D11 = -μ21wyy. To produce the same wyy, a smaller moment is necessary:
| My = -D22(1-μ12μ21) wyy. |
Therefore, for plates with shape orthotropy we can introduce the following definition of the coefficients of transverse contraction:
The coefficient μ21 is numerically equal to the moment My that must be applied to y=constant-edges of the element that is subjected to moment Mx = 1 on edges where x=constant, in order to bend the element into a cylindrical surface w(x). Similarly, the coefficient μ12 is the value of Mx on x=constant-edges of the element subjected to moment My = 1 on edges where y= constant and bent to a cylindrical surface w(y). It can be easily verified that in the case of physically orthotropic plates this definition is equivalent to the original definition (8) and in the case of isotropic plates it results in the known relation μ12 = μ21 = μ . At the same time, with this definition it is clear that if the structure resembles a strong grate with a thin plate, it is practically true that μ12 = μ21 =0 and formulas from paragraph 6.2.2.1 are applicable.
The Maxwell-Betti theorem for plates with shape orthotropy:
If a plate element is subjected only to moment Mx = 1, it leads to curvatures
|
wxx = -1 / D11(1 - μ12μ21), wyy = + μ12 / D11(1-μ12μ21). |
(67) |
If it is subjected only to moment My = 1, the curvatures are
|
wyy = -1 / D22(1-μ12μ21), wxx = + μ21 / D22(1-μ12μ21). |
(68) |
If the deflection is small, the radii of curvature are Rx = 1 / wxx , Ry = 1 / wyy. If we relate the moment to a unit width, i.e. if we think about an element with sides bx = by = 1, then the angles of mutual twisting of the originally parallel vertical sides of the element are

|
The Maxwell-Betti theorem α = β results in the equality (67) = (68), i.e.

|
(69) |
which is identical with the equality (18) for physically orthotropic plates. However, in that case it was a result of a general symmetry of physical constants (8) that follows directly from the requirement that the potential energy of internal forces of the body be a homogenous quadratic function of stress components or deformation components.
Also in plates with shape orthotropy it must be ensured that the relation (69) is satisfied. If we use a technical reasoning or an experiment to determine e.g. coefficient μ21 for the situation shown in Fig. 7a, also the other coefficient (for the situation in Fig. 7c) is determined.
|
(70) |
Satisfying this relation does not result in large values of μ for technical materials that behave like physically orthotropic materials (plywood, fibreglass, etc.). For example one specific type of pressed plywood has
|
or another type of cross-glued plywood gives

|
In practice, there may be a big ratio D11/D22 in shape-orthotropic plates, which may be in the range of 10 to 20.
Usually however, it is found that, at the same time, the coefficient μ21 is very small, and therefore μ12 does not exceed 0.5 or 1.0. With regard to the definition of μ12,μ21 by means of bending moments (Fig. 7), also values exceeding 0.5 or even 1.0 are not, in technical point of view, faulty. After all, they do not represent physical coefficients of contraction, which would be limited by volume changes of the substance. In real situations and with proper thinking about transverse moments, such values are really rare.
As the determination of the actual coefficient μ12 or μ21 can itself represent quite a difficult problem, simple approximate formulas are used in practice for what is called non-diagonal stiffness element D12 that does not include these coefficients, but only the coefficient μ of the isotropic material that the plate is made of, for example μ = 0.15 for concrete or 0.30 for steel. In ribbed plates and hollow core slabs, we can use the simplified formula (28):
|
(71) |
or a similar formula (27) that, however, gives positive D12 only for γ+μ>1 , which e.g. limits its application in concrete to situations when 0.85 < γ < 1that are however quite frequent.
Similarly, instead of (56) the simplified formula (23) can be used:
|
(72) |
and the increased modulus of elasticity (41) is substituted into the formulas (53) to (55), which represents a broadly small increase of 2.25% in concrete and 9% in steel.
Conclusions from the previous paragraph 6.2.2.1 are applicable for the utilisation of values of Mxy.
Note concerning the plate mid-plane:
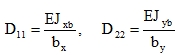
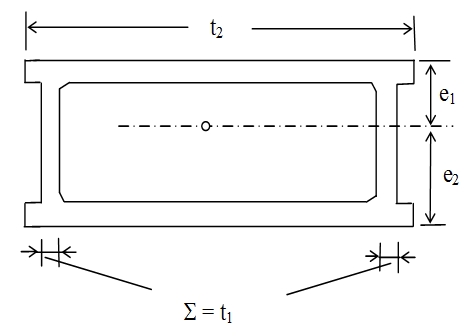
It can be seen in the previous figures that, generally, the centre of gravity of sections x=constant is located in a different distance ex from the top fibre than the centre of gravity of sections y=constant ey. Therefore, we may ask a question about where the mid-plane of the plate is located. This question disappears if we consider that we calculate with a two-dimensional plate continuum where ex, ey belong in fact among the “physical” properties. More serious error, however, occurs in plates with different ribs as a result of neglecting the planar stiffness  of the top plate, or the area of thickness t. What proved useful for such situations is the Giencke formula for mixed stiffness (20)
of the top plate, or the area of thickness t. What proved useful for such situations is the Giencke formula for mixed stiffness (20)

|
(73) |
that is based on the total torsional stiffness of the plate
|
(74) |
And this can be used to determine the orthotropy constant (26); see [1], p. 38
Shear forces and reactions
Shear forces result from the requirement of moment equilibrium of a plate element around the y-axis and x-axis (Fig. 2):
|
(75) |
|
(76) |
After substitution of (16), (58), (59) we have

|
(77) |

|
(78) |
If we compare this formula with the fourth and fifth line of matrix (16) for physically orthotropic plates, we can see that instead of the mixed stiffness D3 according to (20) the fourth line now contains the element
| D3x = D12 + 2D33y | (79) |
and the fifth line contains
| D3y = D12 + 2D33x . | (80) |
In the basic plate equation (25) - which is the condition of vertical equilibrium of a plate element
|
(81) |
and simultaneously the Euler's differential equation of variational plate problem - the application of (79) and (80) changes the expression 2D3 into the expression (D3x + D3y), so that we have the following formula for the determination of the value of D3
|
(81) |
Approximately (see 63a) we have
|
However, programs for physically orthotropic plates calculate Tx and Ty according to matrix (16). Values applicable for plates with shape orthotropy can be derived from these values only by means of a rather complex calculation. If we already know torsional moments Myx and Mxy, this calculation can be inspected directly by (75) and (76). In both situations, the derivatives are substituted by differences of values in adjacent finite element nodes of the analysed plate and, therefore, we cannot get the full conformity.
The first members (75) and (76) prevail over the second ones in the larger part of the plan-area of common plates and, in addition, the difference between (79), (80) and (20) is not too big. Therefore, values Tx and Ty can be used for an approximate shear design.
The reactions of the plate are calculated from (29) or (30) also for the plates with shape orthotropy.
Plates with the effect of transverse shear taken into account
This is an analogy to short, high, etc. beams in which it is not possible to neglect the effect of shear forces T on the deformation, as that effect is comparable to the effect of moments M. This influences the shape of deflection line w(x) and thus also the values of all statically determined quantities, e.g. hogging moments that are decisive for the design.
Current programs have been developed for physically orthotropic plates following the paragraph 5.2 with the matrix of physical constants (33) and optional expansion into a full matrix of (5, 5) type in the case of a general anisotropy. Therefore, it is first necessary to transform a shape-orthotropic plate into a physically orthotropic plate, i.e. to determine constants Dik in matrix (33).
Instructions from paragraph 6.2.2 apply to constants D11, D12, D22, D33. What remains is to determine constants D44 and D55 in formulas

|
(82) |
that specify the relation between shear forces and transverse shear components of deformation γ , i.e. the change of right angles between the normal of the mid-plane of the plate after its transformation into the flexural surface w(x, y), see Fig. 8. These deformations (32) are zero only if wx = -φy, wy = φx (see the sign convention, Fig. 1 and 8), i.e. the Kirchhof hypothesis (4) is valid.
The most important formulas are obtained if the transverse shear stress τxz, τyz is assumed distributed uniformly across the sectional area Fx, Fy of sections with the width of b = 1 constructed though planes x=constant and y = constant. For a ribbed plate in Fig. 8 we have
|
(83) |
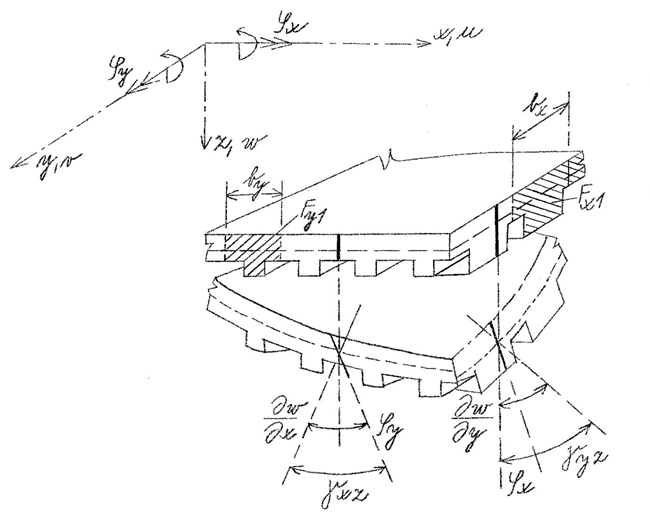
Fig. 8
In that case Tx = τxzFx , Ty = τyzFy , and with identical shear modulus G in both directions we have
| D44 = GFx , D55 = GFy | (84) |
If there are no ribs in one or both directions and if the plate thickness is h, then in that direction
| Fx = h , Fy = h , and thus in the solution of an isotropic thick plate | (85) |
| D44 = D55 = Gh. | (86) |
These formulas are sufficient for the estimate of the magnitude of shear stress and for the estimate of required shear reinforcement in concrete.
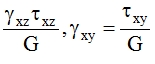
More detailed analysis however requires that the actual distribution of shear stress τxz(z), τyz(z) in interval -h1 ≤ z ≤ h2 be taken into account, where h1 + h2 = h is the plate thickness and h1, h2 the distance of extreme fibre from the centroid of the section. In plates with shape orthotropy, it is possible to use the well known Grashof – Zuravky formula (with plate indexes)
|
(87) |
and similarly for τyz where 2η(z) is the width of a section in the point specified by the coordinate z, and S(z) is the first moment of the section above this width related to the horizontal centroidal axis (Fig. 9). In rectangular section of width η = 1 this formula gives the distribution τxz (z) that follows a parabola of the second order with its maximum  in the centroid.
in the centroid.
The same distribution can be obtained in isotropic plates in the Kirchhof theory (4) from Cauchy equations of equilibrium, and therefore, we can assume that the application of (87) in plates with shape orthotropy will be fairly accurate.
An uneven distribution of shear stress τxz (z), τyz (z) results in shear deformations γxz (z), γyz (z), distributed non-uniformly across the plate thickness.
If we introduce the assumption of a rigid normal (Fig. 8), the consequence is that we get constant γxz , γyz and thus also τxz , τyz , and therefore the formulas (83) – (86) are justified. If we apply the more accurate distribution (87) and want to stick to the procedure of the finite element method, we have to find out the relation between Tx, Ty and values γxz , γyz, that are independent on z and represent angular changes in the sense of the equivalence of the potential energy of internal forces. For plates with shape orthotropy let us again proceed on the assumption of beam theorization: In a beam element of length l, in which a constant force Tx is acting, the accumulated potential energy is:
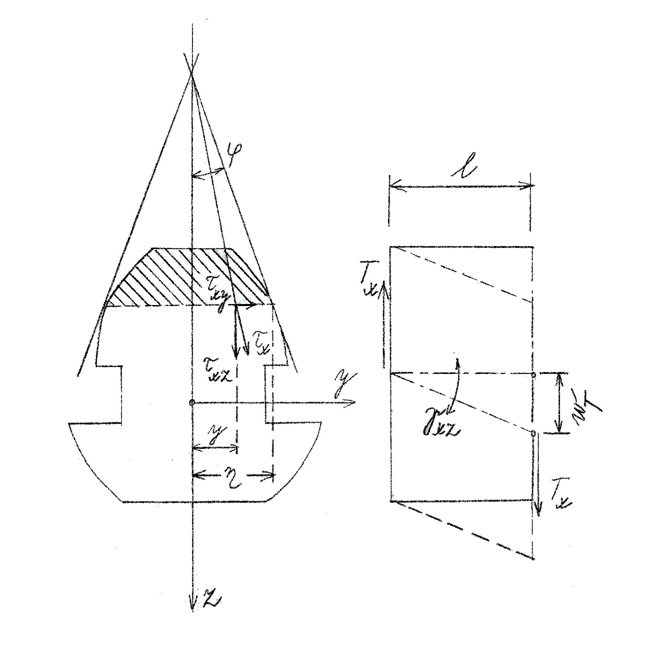
Fig. 9
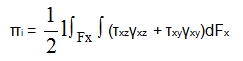
|
If we substitute into this formula from the Grashof hypothesis τxz (87) and
|
and from Hook’s law ,
|
we get
|
Let us introduce the usual formula for the energy with a corrective coefficient β that expresses the variation of τ across the section
|
(88) |
|
(89) |
Let us write the energy (88) in the form of a half the product of the force Tx and path wT (Fig. 9):
|
Then it is clear that a constant angular change, equivalent in terms of energy to variables γxz (z), is
|
Instead of formulas (84) that are valid for a constant τxz across the whole section, we may use the following elements of the matrix of physical constants:
|
(90) |
where subscripts β indicate that β can be different for sections x=constant and y=constant.
Box-sections
Thick-walled box-section – non-solid slabs
A non-solid plate with continuous hollow cores in one direction (let us denote it x) can be calculated as a shape-orthotropic plate with transverse contraction and thus formulas from paragraph 6.2.2 apply to it.
The assumption is that the webs of the box-sections are thick enough. Their thickness ti (it can be even variable) should roughly satisfy the inequality

|
(91) |
where h is the total plate thickness. If the vertical webs are thick enough (ratio bs / b › 1/10 ), the influence of shear forces on the deformation of the plate can be neglected and the following formulas from paragraph 6.2.2 can be used to determine the matrix of physical constants (Fig. 10):
|
| Section | β |
|---|---|
|
Rectangle (plate without ribs) |
6/5 |
|
Solid circle and approximately also solid n-angle (n ≥ 6) |
32/27 (TP 3) 10/ 9 (ROARK) |
|
Circle – thin-walled circular rings and approximately n-angles (n ≥ 6) |
2 |
|
Steel I-beam no. 8 to 45 |
2.8 to 2.1 |
|
Concrete profiles: I, square, T, etc. with sectional area F and web area Fs, approximately |
F/Fs |
|
I-sections, squares, etc. with the sum of vertical webs thickness t1and radius of gyration to the neutral axis r:
|
|
The value Jx is calculated for section y=constant with a unit width that goes through the thinnest part of horizontal webs of the box-sections.
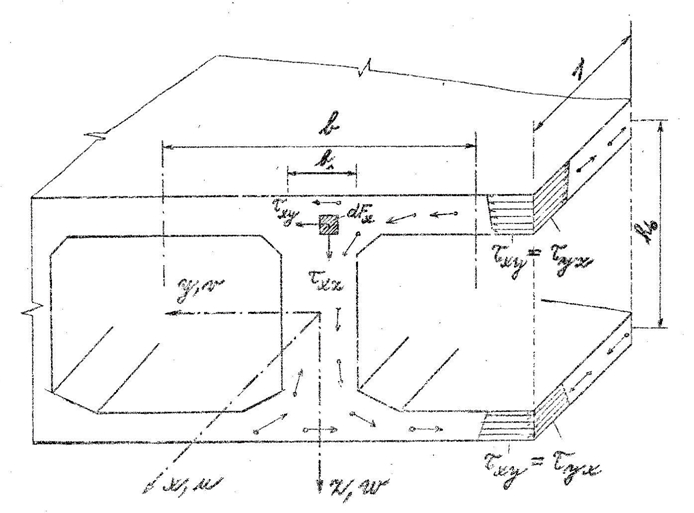
Fig. 10
Values Jxb are calculated for an I-section where the flange width b is always the distance between the vertical axes of the boxes. In case of unequal boxes also the I-sections are asymmetrical. Jxb is always related to the horizontal centroidal y-axis. The difference in the height of the centroids of sections x=constant and y=constant (see the note at the end of 6.2.2) is not significant. To determine the torsional element D33, also formula (63) can be used:
|
on condition that we take into account the remarks stated in paragraph 6.2.2 that are given after that formula. It means that the differences between (i) values Jkx, Jky that follow from the Saint Venant torsion of beams and (ii) values Jkx ,Jky relating to the actual shear flow by (58), (59) are in box-sections more significant than in plates with open ribs (Fig. 6b). In Fig. 10 the arrows and circles show the shear flows that approximately occur due to the necessity to keep τxy =τyx. In closed box-sections with vertical webs thick enough, shear circulation may develop and the corresponding Jxk from the beam-based calculation will be broadly accurate. The circulation in the top and bottom part of the section y=constant will be however analogous to Fig. 6b, it will be strongly suppressed and the torsional moment will be approximately defined by the pair of horizontal forces Vx with the lever arm h0. What is important is whether there are transverse diaphragms in the plate and what the distance between them is, as the shear flow is affected in their vicinity. If the diaphragms are distributed close to each other, box-sections are again in fact formed in sections y=constant and their Jky, relating to a unit width, will be decisive for the calculation.
Thin-walled box-sections
They can be approximately analysed as plates with the influence of transverse shear taken account. In this analysis we use input data based on the comparison with modified formulas of V. Křístek:

|
(92) |
where Jxa is the moment of inertia of the I-section of width a (Fig. 11) between box axes. It may however vary across elements, i.e. different boxes. The stiffness D22 is not too overestimated as the influence of the web Jxa is small. Similarly, D33 is quite accurate especially in internal boxes, as the amount of shear flow that gets into the internal thin webs is very small. We may approximately calculate with a proximate value where t is the thickness of horizontal plates and h is their centre-to-centre distance. For unequal thicknesses this value may be approximately determined from formula (96) presented later.
where t is the thickness of horizontal plates and h is their centre-to-centre distance. For unequal thicknesses this value may be approximately determined from formula (96) presented later.
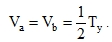
The shear stiffness D55 in transverse direction y (see the fifth line of the matrix (33)) can be found through the comparison of the formula Ty = D55γyz with the formula defining a relation between the transverse force
| Ty = Va + Vb |
in the highlighted I-shape frame of unit width and total skewing γyz = γ1 + γ2 where γ1, γ2 are beam deflections of webs and flanges. Taking dimension as in Fig. 11 we get
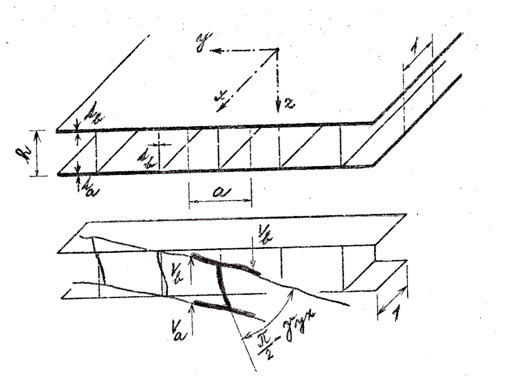
Fig. 11
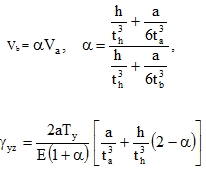
|
(93) |
Therefore:
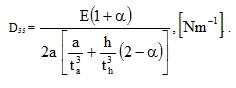
|
(94) |
The shear modulus G23 (paragraph 5) was not needed for this calculation, but it could be determined for the substitute physical plate continuum e.g. on the assumption of (34) from the formula G23 = D55 / h without introducing the conception of a sandwich plate with a soft core.
Stiffness D55 is substantially increased in the location of transverse diaphragms. If they are very rigid and if they provide for non-deformability of the section projection into the vertical plane, then γyz can be neglected in elements located in the vicinity of these diaphragms (see the procedure for D44). This should happen with reasonably designed diaphragms, the web stiffness of which is higher by a factor of ten in comparison with the previously stated stiffness. The variation of D55 over elements can be easily taken into account in FEM. In case of densely located diaphragms, if one diaphragm relates to each finite strip, we can calculate with the average value of D55, but the effect of shear γyz will be small, otherwise the diaphragm would not meet one of its main purposes.
The stiffness D44 (4th line of the matrix (33)) is according to (95) larger than D55 by a factor of ten and the shear changes γxz can be neglected. In the input it can be expressed by the value

|
It could be also possible to modify the program for plates with the effect of shear in one direction that nullifies γxz beforehand.
Processing of printed internal forces:
|
Mx [N] .... |
per one I-section according to Fig. 11 we have M = a Mx , stress σx= Mz / J , extremes σx = ± M / W .
|
| Tx [Nm-1] .... |
similarly, per one I-section, we have T = aTx , stress τxz according to (87), approximately for very thin webs τxz = T / h th only in the web.
|
| My [N] .... |
In the top and bottom plate, axial forces in the transverse y-direction will become apparent Ny = ± My / h and stress σyb = -My / h tb, σya = My / h ta.
|
| Ty [Nm-1] .... |
In the top and bottom plate, the transverse shear forces Vb and Va will occur following from (94), i.e. Va = Ty / (1+α), Vb = αVa , with identical plate thickness.
The transverse shear stress is approximately:
|
| Mxy [N] .... |
In the top and bottom plate, the horizontal shear forces Txy = ±Mxy / h occur and stress τxyb = Txy / tb , τxya = Txy / ta .
|

These values can be used in steel plates to calculate principal stresses that can be used for the assessment of their safety. It is similar in reinforced concrete structures (thin-walled), where the tension is carried by normal or prestressing reinforcement and the effect of Mxy is reflected in the design moments, i.e. in the substitution of Mx , My by Mxdim, Mydim .
Comparative example
In order to compare the input data Dik, let us discuss an example of a deck slab box-section of the overbridge C 201 in Vsetín, Czech Republic, made as a prefabricated lamellar structure.
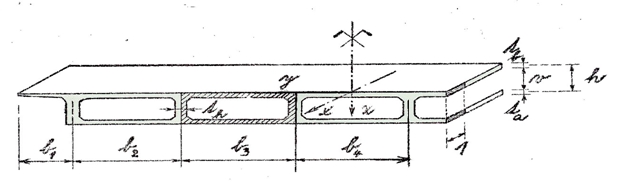
Fig. 12
The division into finite elements was selected to coincide with the plan-view of the boxes, which means that the stiffness of elements was based on the stiffness of individual boxes. The transverse section is schematically shown in Fig. 12 that would be more complex due to the varying thickness of webs. The calculation according to paragraph 6.4.1 – thick-walled structures – (92): Moments of inertia of individual boxes Jxb were found by means of a program for the calculation of geometric characteristics of planar shapes. Moments Jy can be easily calculated using the formula
|
(95) |
where is the centre-to-centre distance of horizontal webs.
is the centre-to-centre distance of horizontal webs.
Vertical webs are of unified thickness 30 cm and their centre-to-centre distance is 300 cm. Further, let us give the approximate dimensions of the box b3 in [cm]: tb = 18, v = 96, ta = 14, h = 112 and the same for box b4: tb = 19.5, v = 101.5, ta = 14, h = 118.
Physical constants E = 385000 daN/cm2 (kp/cm2), μ=0,15.
The stiffness matrix of box b4 (higher numbers by (92) – thick-walled, lower numbers by (93) – thin-walled neglecting the vertical webs):
|
509 809 |
70 316 |
|||
|
448 000 |
67 100 |
0 | ||
|
70 316 |
431 038 |
10 kNm | ||
| D= |
67 100 |
448 000 |
(Mpm) | |
|
199 228 |
||||
| 0 | 0 |
224 000 |
For box b3 :
|
475 046 |
64 720 |
|||
|
389 000 |
58 300 |
0 | ||
|
64 720 |
391 887 |
|||
| D= |
58 300 |
389 000 |
0 | |
|
183 374 |
||||
| 0 | 0 |
194 500 |
The reduction of the flexural stiffness D11 by neglecting the vertical web is apparent; the stiffnesses D22, D33 will be larger, which follows from the thin-walled theory. The differences in moments (multiples of type D11wxx etc.) will be smaller, as the larger D11 gives smaller deflection w and also smaller derivative wxx. It is known that moments in isotropic plates do not depend on D at all if we consider only the action of forces. This independence is of different nature in orthotropic plates: the moments do not depend on the absolute values of Dik, but on their ratios. The most typical ratio for this relation is
|
see (26). Examples of the influence ofχon moments can be found in [ 1 ], pp. 48., table 2 and in diagrams in Fig. 13, p. 52.
Multi-cell slabs with linear hinges in longitudinal direction
This means perpendicular or oblique plates assembled from prefabricated blocks, in which we assume that no reliable monolithic connection exists in the transverse direction (e.g. through transverse prestressing, which would cause that they would be treated as monolithic plates in accordance with the previous paragraphs).
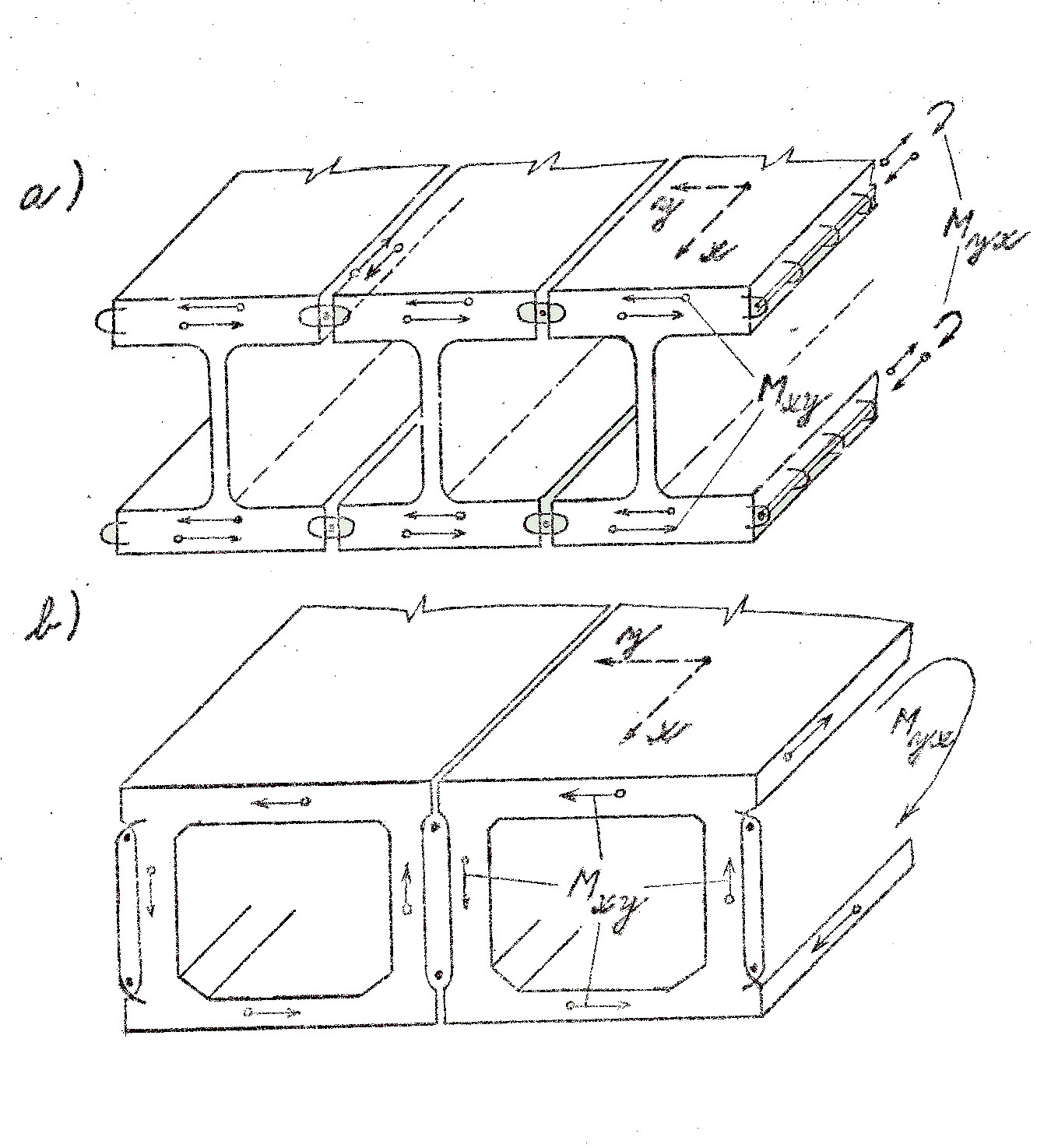
Fig. 13
Longitudinal joints transfer only shear forces Ty and no bending moments My.
There are many types of multi-cell slabs with linear hinges in longitudinal direction. In terms of input data Dik, all of them fall between two limit situations (Fig. 12):
a) The vertical webs of the box-sections are so thin that practically no shear flows gets into them and the torsional moment Mxy transfers only the shear in the top and bottom web. Then we may consider the equality  , and therefore, following from (63), the torsional stiffness is
, and therefore, following from (63), the torsional stiffness is
|
(96) |
if we calculate Jkb [m4] for one prefabricated block of width b [m].
Similarly to box-sections, the formula (92) applies to other stiffnesses.
b) The vertical webs of the sections are so thick that a continuous circulation of shear flow occurs in sections x=constant, which (considering the theorem of reciprocity τxy = τyx ) influences also the shear flow in sections y = constant. Then, we apply the formula (63) with varying torsional stiffnesses Jkx , Jky [m3] and constant shear modulus G:
|
c) A special situation arises when the longitudinal joints cannot transfer any torsional moment. Then we have Jky = 0 ,

|
Formulas (62) generally apply to the evaluation of printed Mxy.
If the webs in plates in Fig. 13a are so slim that transverse skewing occurs, the appropriate stiffness D55 from paragraph 6.3 can be found on the basis of the formula (95) from paragraph 6.42.
Other plate types
Reinforced concrete plates with different reinforcement Fax, Fay in x- and y- direction behave in the first phase practically like isotropic plates until cracks form in the tensile part of the concrete. In the second phase, we have to find moments of inertia Jx, Jy of the non-homogenous sections of unit width composed of (i) steel and (ii) concrete in compression. The ratio Jx/ Jy is approximately equal (plus or minus a few per cent) to the ratio Fax/ Fay. As the zone of concrete in compression, where some transverse contraction (or dilatation) still occurs, is small, the effective value μ is lower than 0.15. The value 0.02 was measured. The stiffnesses are calculated from the formulas stated earlier

|
(97) |
|
(98) |
The effect of shear is taken into account only in plates whose thickness h › L / 5, see paragraph 5.2 and 6.3. Deviations that are of practical significance occur only if h › L/3.
Corrugated plates are calculated using the formula (98), and for sinusoidal shape of sections x = constant we take:
|
(99) |
where the shape of the corrugation is z = H sin πx / l, the thickness of the corrugated plate is h, the amplitude of waves is H, and the length of the chord of one half-wave is l. This can be used approximately also for non-sinusoidal shape of the waves. Doubled corrugated plates (system BEHLEN, PUMS, etc.) require a special calculation of Jx. In extra-thin corrugated plates, Jx can be calculated on the curve z = f(x) and then multiplied by the thickness h. The ratio Jy / Jx is almost zero.
Double-layer braced plates are beam systems used for roofing of extensive areas (stadium, etc.). For the needs of a preliminary calculation, they can be considered as orthotropic plates, with moments of inertia derived from sectional areas Fax , Fay of the beams in strips in x- and y- direction and lever arms rx , ry to the centroids of these areas, approximately  It is possible to establish the effect of transverse shear similarly to paragraph 6.3. The torsional stiffness is practically zero (D33 = 0, χ = 0 ) in common right-angled systems of strips without diagonals in horizontal planes; in other systems it must be determined by means of comparative calculations. The printed values Mx, My, Tx, Ty can be used for the calculation of axial forces in beams by means of the procedure that is common for lattice girders (intersection method). The procedure can be extended to generally anisotropic plates and is suitable for a preliminary design or for the determination of an optimal variant, etc. After the final design of the system, the accurate assessment can be performed following the calculation of axial forces in beams of the given system. The beams are, depending on the nature of joints, considered as a three-dimensional lattice girder or as a frame.
It is possible to establish the effect of transverse shear similarly to paragraph 6.3. The torsional stiffness is practically zero (D33 = 0, χ = 0 ) in common right-angled systems of strips without diagonals in horizontal planes; in other systems it must be determined by means of comparative calculations. The printed values Mx, My, Tx, Ty can be used for the calculation of axial forces in beams by means of the procedure that is common for lattice girders (intersection method). The procedure can be extended to generally anisotropic plates and is suitable for a preliminary design or for the determination of an optimal variant, etc. After the final design of the system, the accurate assessment can be performed following the calculation of axial forces in beams of the given system. The beams are, depending on the nature of joints, considered as a three-dimensional lattice girder or as a frame.