Stress components in physically orthotropic plates
For brevity, we will limit ourselves to the most frequent examples with the coordinate axes (x and y) put into the axes of orthotropy. This approach is generally recommended, as it simplifies the notation.
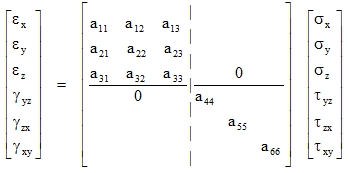
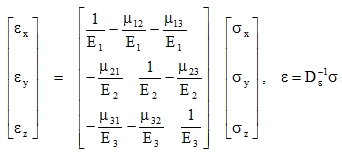
The approach is based on general relations between (i) deformation components and (ii) stress components in the primary form ε = D-10 σ:
|
(5) |
Let us define the following constants known as technical constants:
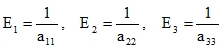
(●) Three (Young) moduli of elasticity:
|
(6) |
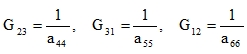
(●) Three (Lamé) shear moduli of elasticity:
|
(7) |
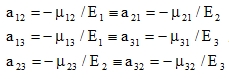
(●) Six (Poisson) coefficients of transverse contraction μik using the following formulas:
|
(8) |
The identities (º) follow from the symmetry aik = aki, which means that from the nine E and μ constants, only six are independent. Thus, together with three G constants, we get nine constants E, G, and μ that are necessary to describe the physical properties of the analysed type of an orthotropic substance. Axes x, y, and z are marked with subscripts 1, 2, and 3. The coefficient μik equals to the relative transverse contraction in the i-direction with tension σk = E2 in the k-direction. The subscripts of shear moduli can be swapped: Gik = Gki.
The physical law (5) with technical constants can be, for clarity, re-written separately for normal and shear components (this decomposition appears only in orthotropy):
|
(5a) |
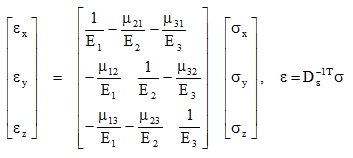
Each line of matrix D-1e contains the same E modulus. The matrix is symmetrical and, therefore, it remains identical after transposition. Consequently, we can write the formula with the same E moduli in columns:
|
(5b) |
In considerations and in calculations we always use the form that is more suitable under the given circumstances. The form (5a) is more frequent.
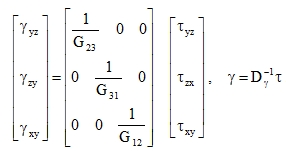
The matrix of physical constants is diagonal for shear components:
|
(5c) |
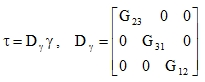
It is thus simple to write a reverse formula:
|
(5d) |
The reverse formula to (5a) is less clear in terms of technical constants. It is however significantly simpler for orthotropic plates, as it is based on the main static assumption of the theory of plates:
| (5e)σz (x, y, z) º 0 . | (5e) |
Here, the formula (5a) splits into two simpler formulas:
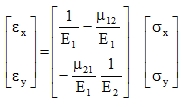 and and |
(5f) |
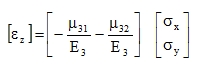
|
(5g) |
Component εz can be considered insignificant and can be omitted in further considerations, which applies also to orthotropy. Contrary to isotropy, we can even define a material with non-zero transverse contraction in the (x, y) plane, but with zero μ31, μ32 or with E3 → ¥, and meet the condition that εz º 0 at σz º 0. It is however of no practical meaning.
The formula (5f) can be easily inverted, and thus we get to the full relation σ = D ε of type (5.1) = (5.5) (5.1) that takes form (9) for plates, if we arrange the components in a way that is practical for plates:
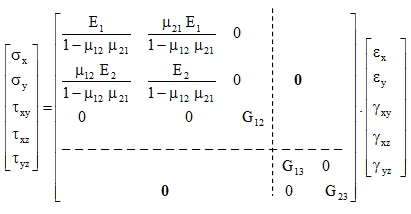
|
(9) |